一次性搞清楚步进电机与伺服电机的核心区别

在电机及其控制系统研发领域,步进电机和伺服电机是两种最常见且应用广泛的控制电机。它们都能实现精确的位置、速度和力矩控制,但在原理、性能和应用上存在本质区别。理解这些区别,对于选择合适的驱动方案至关重要。
一、 工作原理与结构差异
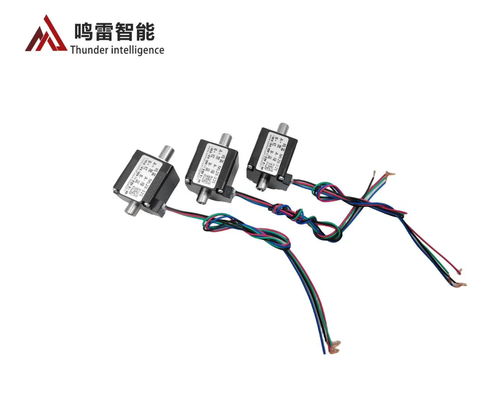
- 步进电机:其工作原理基于电磁铁吸引永磁体的基本原理。它将电脉冲信号转换为角位移,每接收到一个脉冲,电机就按设定的方向转动一个固定的角度(即步距角)。其内部结构通常为永磁式或混合式,没有内置的位置反馈装置(开环控制)。
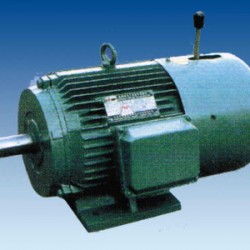
- 伺服电机:其工作原理基于闭环控制理论。它通常由电机本体(交流永磁同步电机为主)、编码器和驱动器三部分组成。编码器实时反馈电机转子的位置信息给驱动器,驱动器将反馈信号与目标指令进行比较,并调整输出电流,形成一个闭环控制系统,确保电机精确跟随指令。
二、 核心性能指标对比
- 控制精度:
- 伺服电机:精度极高。其精度取决于编码器的分辨率(可达数万线甚至更高),且闭环控制能实时修正误差,不存在累积误差。
- 步进电机:精度由步距角决定(常见有1.8°、0.9°)。其为开环控制,单步误差小,但在高速或负载突变时可能发生“丢步”(脉冲未执行)或“过冲”(超越目标位置),且误差会累积。
- 动态响应与过载能力:
- 伺服电机:动态响应极快,加速性能优异。具备强大的过载能力(通常可达额定转矩的2-3倍),能短时间内克服较大的惯性负载。
- 步进电机:启停响应快,但在高速时力矩下降快(存在“力矩-频率”特性曲线)。过载能力差,一旦负载力矩超过其保持转矩,极易失步。
- 运行特性:
- 伺服电机:运行平稳,即使在低速时也无振动和噪音(得益于闭环控制)。速度范围宽,可实现恒力矩输出。
- 步进电机:低速时易出现低频振动和噪音(共振现象)。高速性能弱,力矩随转速升高而下降。
- 成本与复杂度:
- 步进电机:系统结构简单,成本低,调试和维护相对容易。
- 伺服电机:系统复杂,包含高精度反馈元件,成本高昂,对调试技术要求高。
三、 典型应用场景选择指南
- 选择步进电机,当:
- 成本是首要考虑因素,预算有限。
- 负载确定、稳定,且对动态响应和高速性能要求不高。
- 需要简单开环控制即可满足精度要求,如桌面3D打印机、扫描仪、小型CNC机床的进给轴、广告展架等。
- 选择伺服电机,当:
- 对精度、速度和动态响应有极高要求。
- 负载变化大,需要强大的过载能力和恒力矩输出。
- 要求运行极其平稳、安静,如工业机器人关节、高精度数控机床、半导体封装设备、高速贴片机等。
四、
简而言之,步进电机像一个“服从指令但需自行保持步调”的士兵,结构简单、经济,但在复杂(高速、变载)环境下可能“出错”。伺服电机则像一个“眼观六路、耳听八方并实时修正”的智能机器人,性能卓越、精准可靠,但代价是更高的成本和系统复杂性。
在电机及控制系统研发中,工程师应根据具体的应用需求、性能指标、成本预算和系统复杂度进行综合权衡,才能做出最优选择。随着技术发展,两者界限在某些领域(如采用闭环控制的高端步进系统)有所模糊,但上述核心差异依然是选型的基本依据。
如若转载,请注明出处:http://www.fadianzj.com/product/26.html
更新时间:2026-06-18 06:48:46